

1 / 8
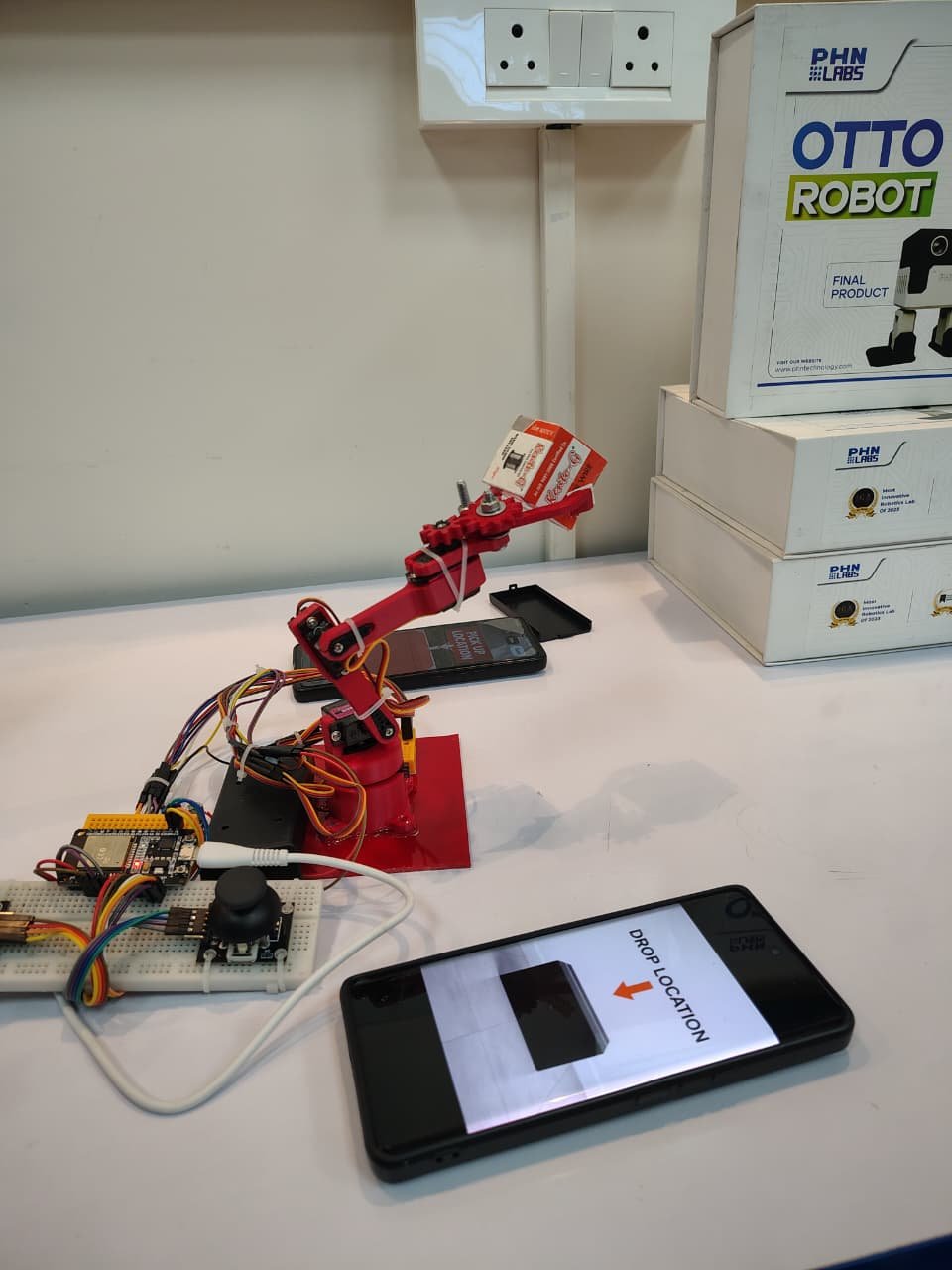
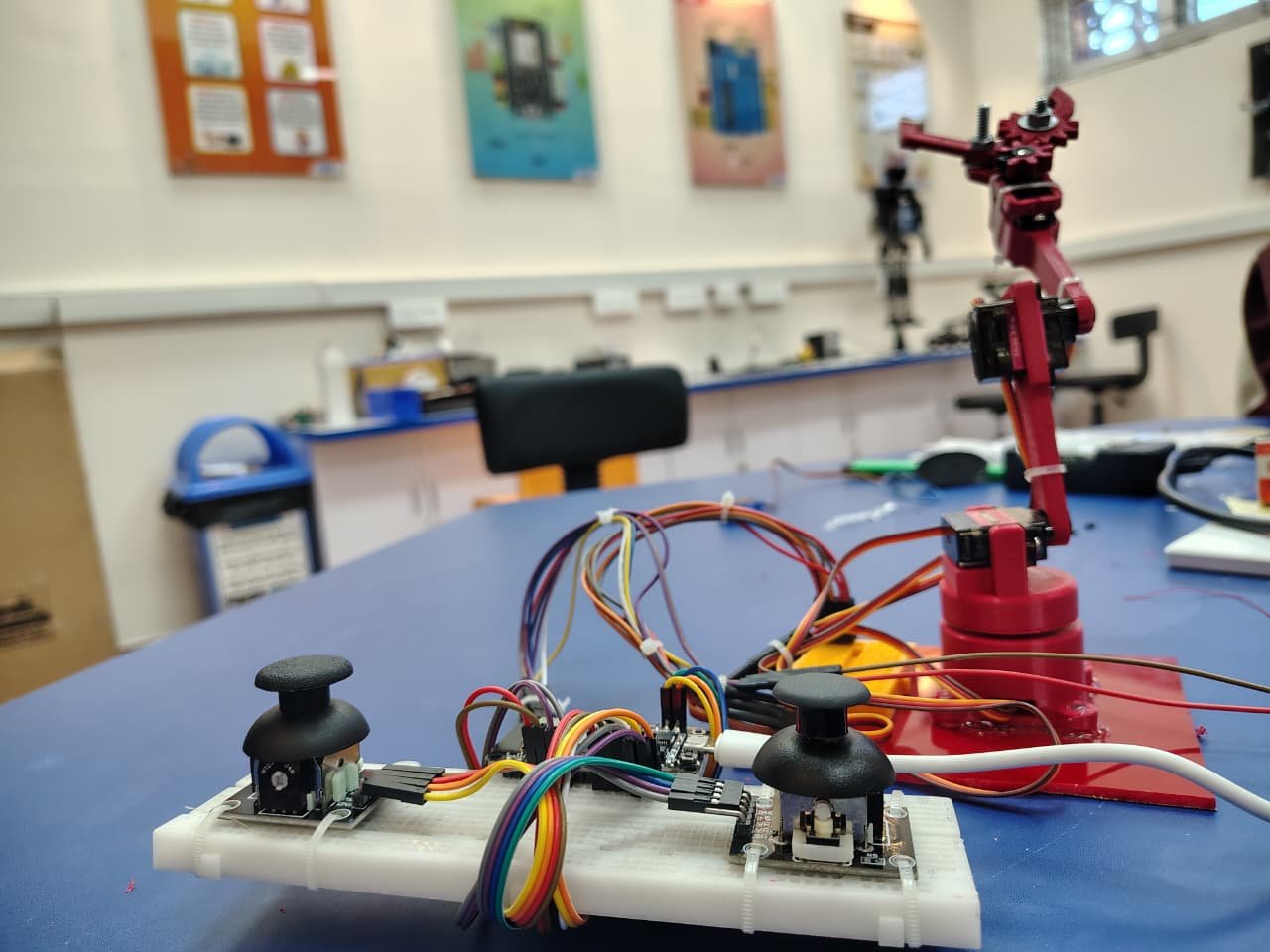
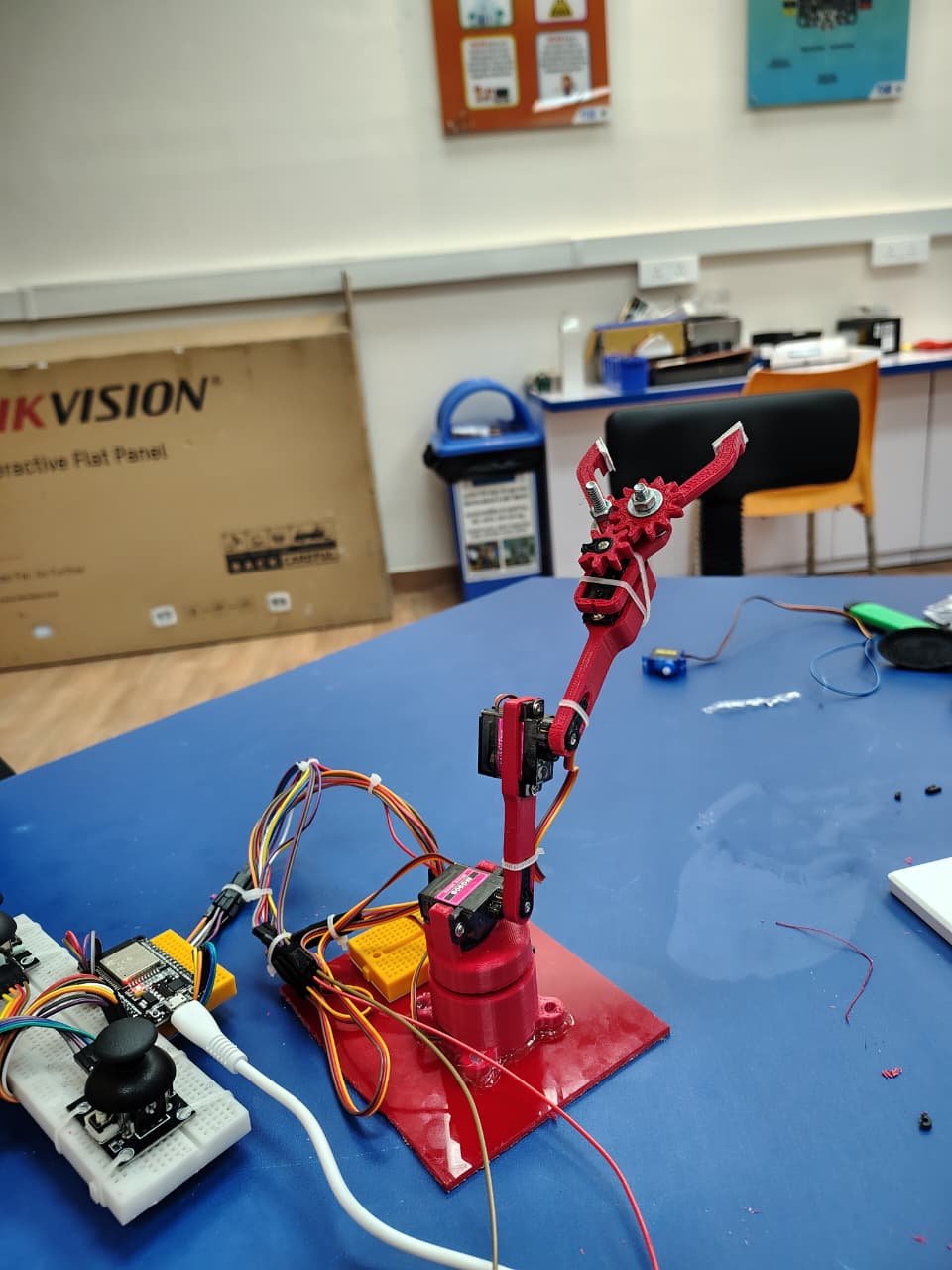
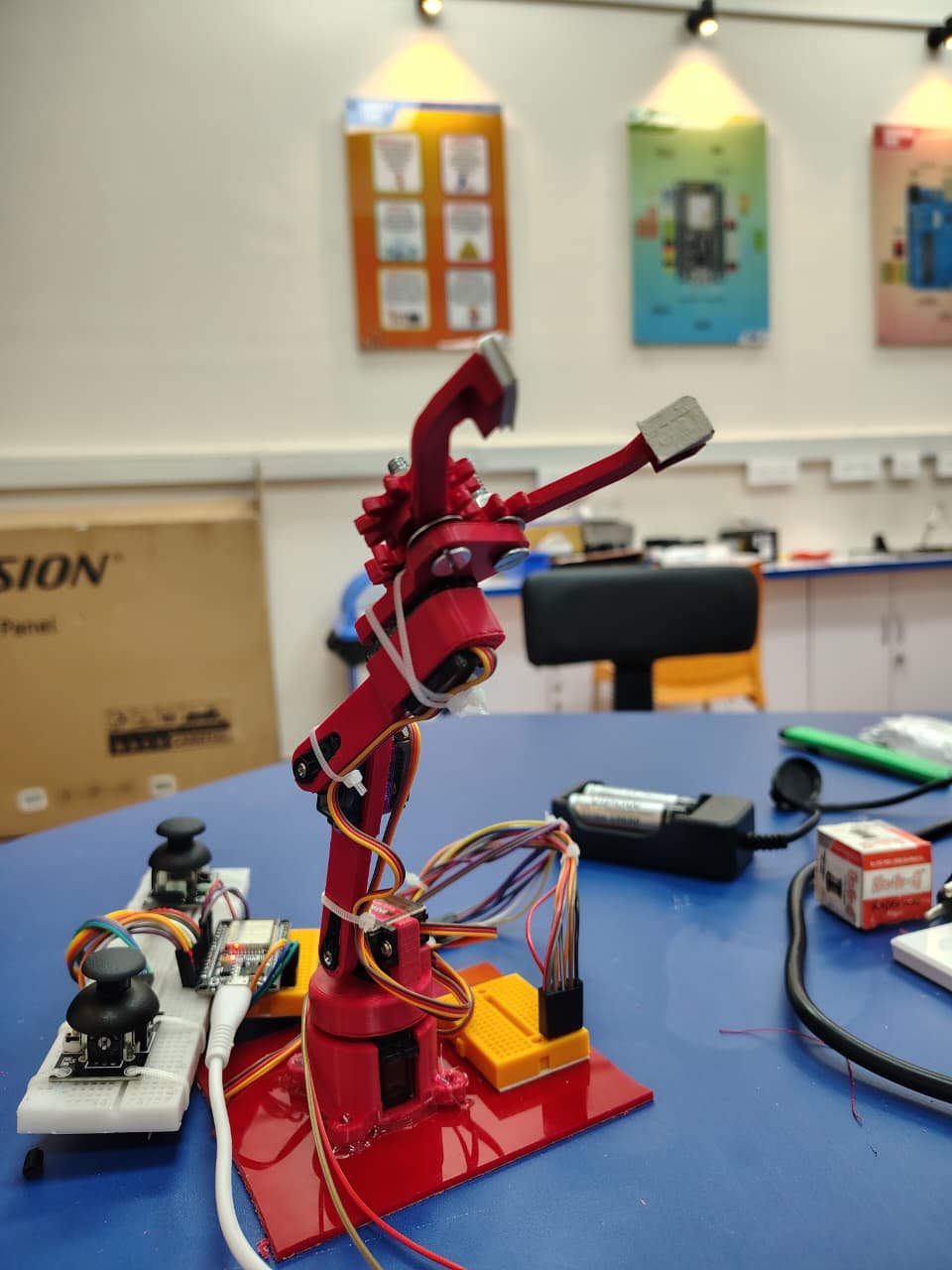
This project presents an ESP32-based robotic arm controlled via joystick and a web dashboard. It enables real-time wireless operation, manual path programming, and automation, providing a low-cost and efficient solution for pick-and-place and robotic applications.
This project demonstrates the development of a smart robotic arm powered by ESP32, capable of performing real-time operations using both physical joystick control and a web-based interface. It integrates IoT technology to enable wireless control through WebSockets.
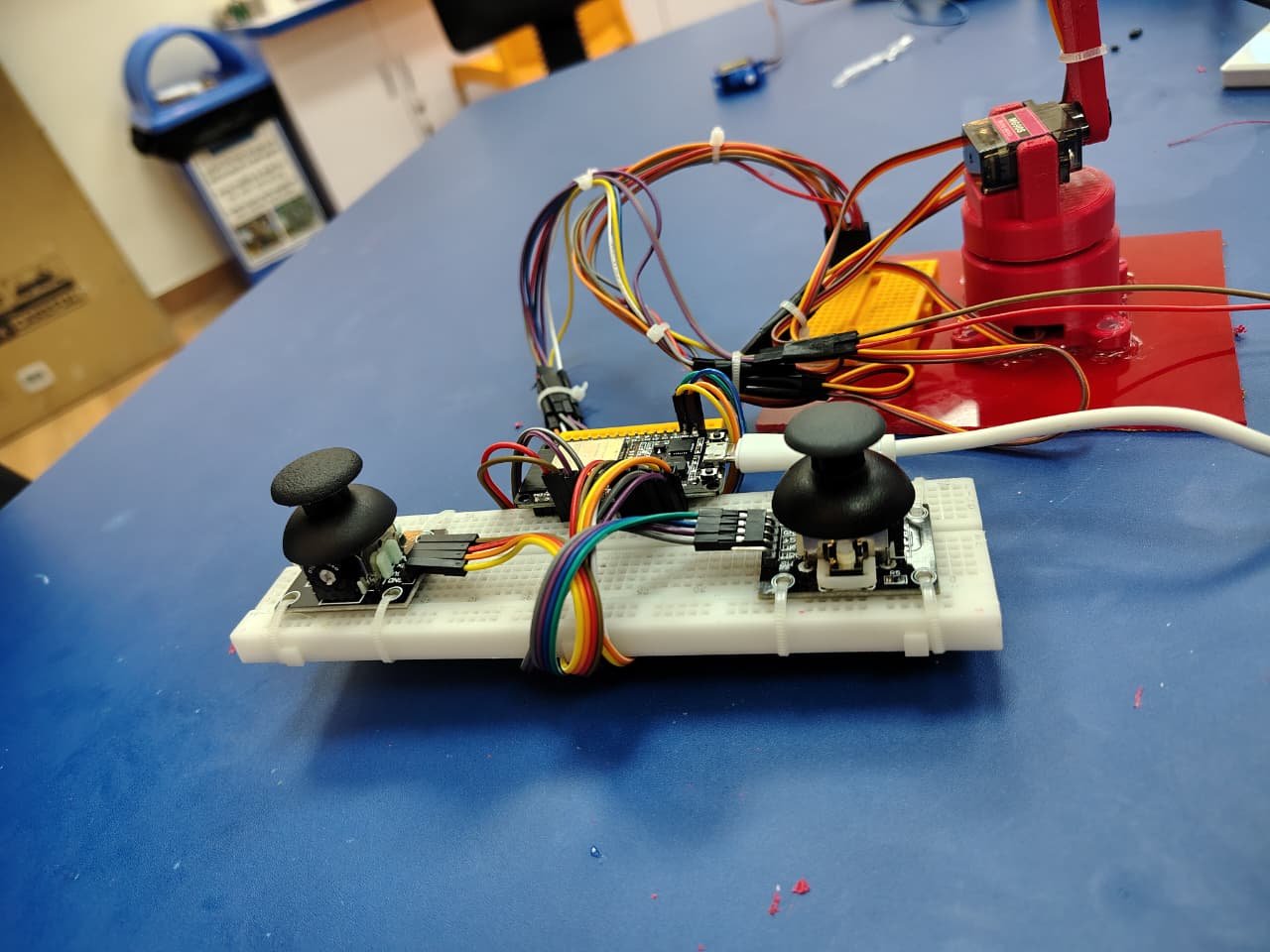
The ESP32 processes inputs from joystick modules or the web dashboard and converts them into servo movements. The robotic arm performs actions such as picking, placing, and automated motion sequences using programmed paths.
This project provides a cost-effective and scalable solution for robotic automation by combining embedded systems, IoT, and real-time control, making it suitable for both learning and practical applications.